Keď je aktivovaný systém parkovacieho asistenta pri cúvaní, riadiaci modul systému rozsvieti LED diódu v tlačidle spínača, aktivuje senzory a dá systému príkaz vydať jedno pípnutie na potvrdenie aktivácie systému. Ak sa do dosahu snímača dostane nejaký predmet, po zapnutí systému okamžite zaznie sled zvukových varovných signálov.
Ak činnosť parkovacieho asistenčného systému nie je potrebná, možno ho dočasne deaktivovať stlačením spínacieho tlačidla. Vo vozidlách vybavených iba zadnými snímačmi je možné systém znovu aktivovať opätovným stlačením spínača alebo vypnutím a opätovným zapnutím zapaľovania. Systém sa potom automaticky zaradí po zaradení spiatočky. Systém zostáva aktívny pri zaradení spiatočky do neutrálu. Toto zohľadňuje pravdepodobnosť, že vodič bude pokračovať (akýmkoľvek spôsobom) posuňte vozidlo dozadu s prevodovkou v neutrále.
Keď je pripojený príves, modul parkovacej pomoci prijíma signál cez zbernicu CAN z centrálnej elektrickej skrinky. Po prijatí takéhoto signálu riadiaci modul systému parkovacieho asistenta pozastaví systém.
Vo vozidlách vybavených prednými a zadnými senzormi sa parkovací asistenčný systém automaticky aktivuje pri zapnutí zapaľovania (pozícia II), volič nie je v polohe Parkovanie a elektronická parkovacia brzda je vypnutá. Pri rýchlostiach nad 10 km/h sa predný parkovací asistent deaktivuje. Keď rýchlosť vozidla klesne pod 6 km/h, predný parkovací asistenčný systém obnoví činnosť. Ak je aktivovaná elektronická parkovacia brzda (EPB) alebo je volič v polohe Park, parkovací asistenčný systém je vypnutý.
Činnosť snímača
Modul parkovacieho asistenčného systému analyzuje údaje prijaté zo snímačov, aby zistil prekážky v oblasti pôsobenia snímačov. Ak nie sú zistené žiadne prekážky, parkovací asistenčný systém nevydá žiadne pípanie. Ak sa zistí prekážka, reproduktor parkovacieho asistenta vydá sériu pípnutí.
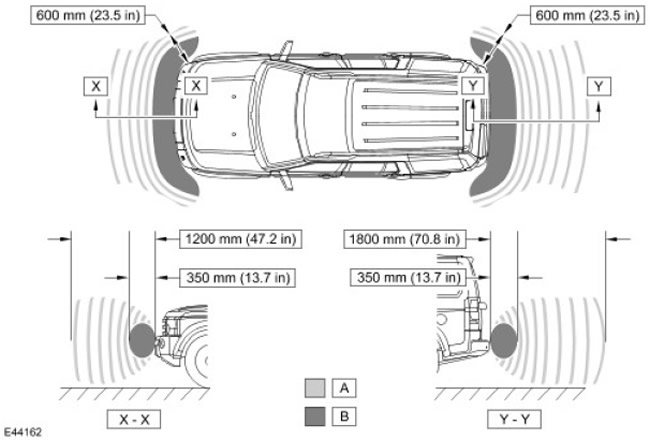
Maximálna vzdialenosť detekcie prekážky je 1800 mm. Keď je rozpoznaná prekážka, keď sa k nej priblížite, medzera medzi zvukovými signálmi sa zmenšuje a vo vzdialenosti približne 350 mm od prekážky sa zvukový signál stane súvislým.
Ak sa vzdialenosť medzi prekážkou a centrálnymi snímačmi od okamihu detekcie prekážky ďalej nezmenšuje, interval medzi zvukovými signálmi sa nemení. Ak je objekt detekovaný iba jedným snímačom okrajov, alarm sa zastaví po 5 sekundách, ak sa nezmení vzdialenosť od objektu k snímaču okrajov.
Detekčná zóna
| Názov položky | Číslo náhradného dielu | Popis |
| A | - | Prerušovaný výstražný tón |
| B | - | Nepretržitý výstražný zvuk |
Detekcia prekážok a výpočet vzdialenosti
Snímač pracuje v kombinovanom režime prijímania/vysielania, vysiela ultrazvukové impulzy a prijíma signály odrazené od prekážky. Riadiaci modul parkovacieho asistenta zosilňuje odrazené signály a porovnáva ich s naprogramovanými prahovými hodnotami na výpočet vzdialenosti. To sa dosiahne určením času, ktorý uplynie medzi vysielaním a príjmom ultrazvukového signálu.
Keď je snímač v režime príjmu, prijíma signály žiarenia zo susedného snímača. Tento režim sa používa na zlepšenie presnosti systému.
Cyklus detekcie prekážky spočíva vo vysielaní a prijímaní série impulzov jedným snímačom pracujúcim v kombinovanom režime na príkazy riadiaceho modulu systému parkovacej asistencie.. Potom počítač prepne toto, ako aj susedné senzory, aby prijímali iba odrazený signál. Po krátkej prestávke sa operácia zopakuje, ale teraz ďalší snímač pracuje v kombinovanom režime. Cyklus pokračuje, kým všetky 4 prevodníky nevydajú ultrazvukové signály. Trvá to približne 100 milisekúnd. Riadiaci modul vykonáva niekoľko meraní signálov toho istého snímača, aby sa eliminovali náhodné chyby vo výpočtoch.
Ak je objekt priamo oproti senzoru, vzdialenosť sa vypočíta z času medzi prenosom a príjmom signálu. Ak sa prekážka nachádza medzi dvoma senzormi, riadiaci modul vypočíta vzdialenosť zo signálov dvoch senzorov, čím sa vyrieši problém triangulácie.
Na vyriešenie problému triangulácie musí riadiaci modul poznať vzdialenosť medzi jednotlivými snímačmi v nárazníku. Tieto informácie sú uložené v pamäti riadiaceho modulu. Riadiaci modul, ktorý pozná vzdialenosti od každého snímača k prekážke a vzdialenosť medzi susednými snímačmi, dokáže vypočítať minimálnu vzdialenosť od nárazníka vozidla k prekážke.
Keď sa auto priblíži k niekoľkým prekážkam súčasne, riadiaci modul určí vzdialenosť k najbližšej.
Komentáre k tomuto článku