Când sistemul de asistență la parcare în marșarier este activat, modulul de control al sistemului aprinde LED-ul din butonul de comutare, activează senzorii și comandă sistemului să emită un singur bip pentru a confirma activarea sistemului. Dacă un obiect intră în raza de acțiune a senzorului, o secvență de semnale sonore de avertizare va suna imediat când sistemul este pornit.
Dacă nu este necesară funcționarea sistemului de asistență la parcare, acesta poate fi dezactivat temporar prin apăsarea butonului de comutare. Pentru vehiculele echipate numai cu senzori din spate, sistemul poate fi reactivat prin apăsarea din nou a comutatorului sau prin decuplarea și repornirea contactului. Sistemul se va cupla automat atunci când este selectată treapta de marșarier. Sistemul rămâne activ la trecerea de la marșarier la neutru. Acest lucru ia în considerare probabilitatea ca șoferul să continue (in orice fel) deplasați vehiculul înapoi cu transmisia în poziție neutră.
Când o remorcă este conectată, modulul de ajutor la parcare primește un semnal prin magistrala CAN de la cutia electrică centrală. La primirea unui astfel de semnal, modulul de control al sistemului de asistență la parcare suspendă sistemul.
La vehiculele echipate cu senzori față și spate, sistemul de asistență la parcare este activat automat când contactul este pus (pozitia II), selectorul nu este în poziția Parcare și frâna de parcare electronică este oprită. La viteze de peste 10 km/h, sistemul de parcare frontală este dezactivat. Când viteza vehiculului scade sub 6 km/h, sistemul de asistență la parcare față va relua funcționarea. Dacă frâna de parcare electronică este activată (EPB) sau selectorul este plasat în poziția Park, sistemul de asistență la parcare este oprit.
Funcționarea senzorului
Modulul sistemului de asistență la parcare analizează datele primite de la senzori pentru a detecta obstacolele din câmpul de acțiune al senzorilor. Dacă nu sunt detectate obstacole, sistemul de asistență la parcare nu emite niciun bip. Dacă este detectat un obstacol, difuzorul de asistență la parcare va emite o serie de bipuri.
Distanța maximă de detectare a obstacolelor este de 1800 mm. Când este detectat un obstacol, pe măsură ce te apropii de el, distanța dintre semnalele sonore scade, iar la o distanță de aproximativ 350 mm de obstacol, semnalul sonor devine continuu.
Dacă nu mai există o scădere a distanței dintre obstacol și senzorii centrali din momentul în care obstacolul este detectat, atunci intervalul dintre semnalele sonore nu se modifică. Dacă un obiect este detectat de un singur senzor de margine, alarma se va opri după 5 secunde dacă nu există nicio modificare a distanței de la obiect la senzorul de margine.
Zona de detectare
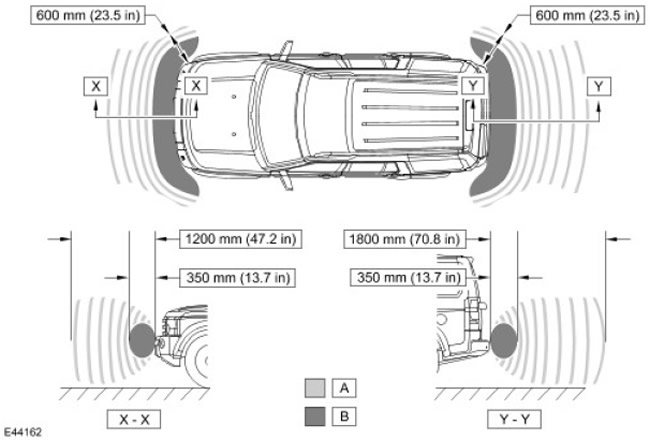
| Numele articolului | Numar piesa de schimb | Descriere |
| A | - | Ton de avertizare intermitent |
| B | - | Sunete de avertizare continuu |
Detectarea obstacolelor și calculul distanței
Funcționând într-un mod combinat de recepție/transmisie, senzorul emite impulsuri ultrasonice și primește semnale reflectate de la un obstacol. Modulul de control al asistenței la parcare amplifică semnalele reflectate și le compară cu praguri programate pentru a calcula distanța. Acest lucru se realizează prin determinarea timpului scurs între transmiterea și recepția semnalului ultrasonic.
Când senzorul este în modul de recepție, primește semnale de radiație de la senzorul adiacent. Acest mod este utilizat pentru a îmbunătăți acuratețea sistemului.
Ciclul de detectare a obstacolelor constă în transmiterea și recepția unei serii de impulsuri de către un senzor care funcționează în mod combinat la comenzile modulului de control al sistemului de asistență la parcare.. Apoi computerul comută acest lucru, precum și senzorii vecini, pentru a primi doar semnalul reflectat. După o scurtă pauză, operația se repetă, dar acum următorul senzor funcționează în modul combinat. Ciclul continuă până când toate cele 4 traductoare emit semnale ultrasonice. Aceasta durează aproximativ 100 de milisecunde. Modulul de control efectuează mai multe măsurători ale semnalelor aceluiași senzor pentru a elimina erorile aleatorii în calcule.
Dacă obiectul se află direct vizavi de senzor, distanța este calculată din timpul dintre transmiterea și recepția semnalului. Dacă obstacolul este situat între doi senzori, modulul de control calculează distanța de la semnalele celor doi senzori, rezolvând problema triangulației.
Pentru a rezolva problema de triangulare, modulul de control trebuie să cunoască distanța dintre senzorii individuali din bara de protecție. Aceste informații sunt stocate în memoria modulului de control. Cunoscând distanțele de la fiecare senzor până la obstacol și distanța dintre senzorii adiacenți, modulul de control poate calcula distanța minimă de la bara de protecție a vehiculului până la obstacol.
Când mașina se apropie de mai multe obstacole în același timp, modulul de control determină distanța până la cel mai apropiat.
Comentarii la acest articol