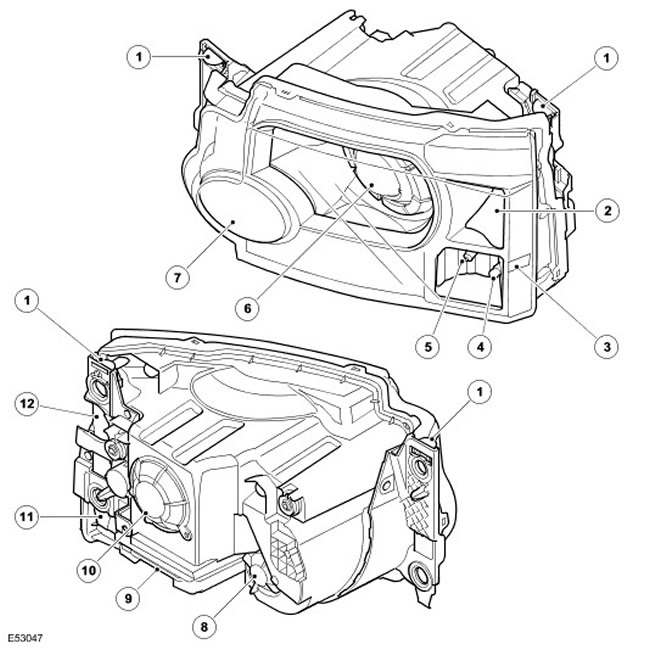
Adaptacyjny reflektor ksenonowy
| Nazwa przedmiotu | Numer części zamiennej | Opis |
| 1 | - | pasek blokady |
| 2 | - | Wskaźnik skrętu |
| 3 | - | Boczne światło obrysowe (Tylko USA) |
| 4 | - | Lampa obrysowa |
| 5 | - | Światła boczne odchylane (z wyłączeniem pojazdów przeznaczonych na rynek amerykański) |
| 6 | - | Adaptacyjne ksenonowe światła mijania/drogowe |
| 7 | - | Halogenowe światła drogowe |
| 8 | - | Pokrywa luku serwisowego świateł drogowych |
| 9 | - | sterownik reflektorów ksenonowych |
| 10 | - | Pokrywa luku serwisowego do świateł mijania/drogowych |
| 11 | - | Osłona włazu serwisowego latarni wymiarowej i latarni bocznej z odchyloną osią (nie pokazany) |
| 12 | - | Pokrywa klapy serwisowej kierunkowskazów (nie pokazany) |
Nowe adaptacyjne reflektory mają na celu poprawę widoczności w różnych warunkach drogowych. Podczas pokonywania zakrętów adaptacyjne reflektory poprawiają oświetlenie tej części drogi, po której będziesz się poruszać. Optymalizacja położenia wiązki światła w płaszczyźnie poziomej odbywa się automatycznie na podstawie położenia wału kierownicy oraz informacji z innych czujników systemu pokładowego.
Reflektory adaptacyjne są dostarczane tylko z lampami ksenonowymi, a system obejmuje obwód dynamicznej regulacji zasięgu reflektorów, opisany w rozdziale «Regulacja zasięgu reflektorów».
Wewnątrz reflektora blokowego znajduje się moduł reflektora ksenonowego dwufunkcyjnego, którego położenie w płaszczyźnie pionowej i poziomej jest regulowane przez silnik elektryczny reduktora zgodnie z profilem drogi i promieniem skrętu. Tylko projektor z podwójnymi reflektorami ksenonowymi może zmieniać swoje położenie, podczas gdy reflektor świateł drogowych z lampą halogenową pozostaje nieruchomy.
Reflektory adaptacyjne są sterowane przez własny sterownik, który znajduje się w dolnej części słupka «A», za blokiem CJB. Sterownik reguluje pionowe i poziome położenie reflektora ksenonowego w zależności od działania świateł uchylnych bocznych, co jest wymagane przez sterownik zespołu reflektorów adaptacyjnych, ale sterowane przez moduł CJB.
Jak działa AFS
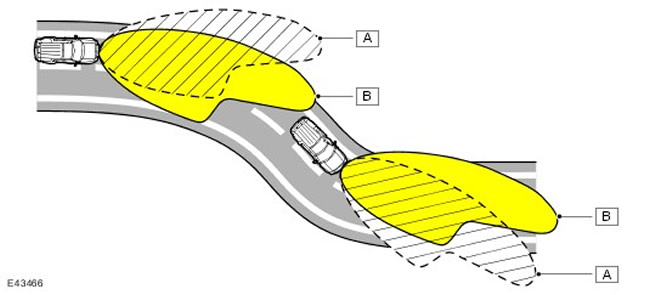
| A | Schemat rozkładu oświetlenia dla konwencjonalnego reflektora |
| B | Schemat rozsyłu światła dla reflektorów adaptacyjnych |
Sterownik AFS
Sterownik AFS to urządzenie dwufunkcyjne, które zawiera również oprogramowanie do dynamicznej regulacji zasięgu reflektorów. Sterownik AFS jest podłączony do szybkiej magistrali CAN i odbiera informacje z innych systemów pokładowych dotyczące następujących parametrów:
- Kąt skrętu — z czujnika kąta skrętu
- Prędkość pojazdu - ze sterownika ABS
- Stan świateł mijania — z tablicy rozdzielczej
- Wysokość zawieszenia - od sterownika zawieszenia pneumatycznego
- Odczyt licznika kilometrów — wyłącznie do celów diagnostycznych
- Praca silnika - z ECM
- Pozycja biegu - z jednostki sterującej skrzyni biegów lub sterownika skrzyni rozdzielczej
- Rozruch silnika - z ECM
- Temperatura na zewnątrz / wewnątrz kabiny - tylko w celach diagnostycznych
System AFS zostanie uruchomiony również wtedy, gdy włącznik świateł znajdzie się w pozycji AUTO, a sterownik AFS odbierze sygnał do włączenia świateł z czujnika deszczu/światła oraz sygnał potwierdzenia pracy silnika.
Kontroler AFS zaczyna wtedy monitorować dane wejściowe z innych systemów pojazdu i sterować reflektorami w zależności od prędkości pojazdu i promienia skrętu.
Piny złącza sterownika C2193 AFS
| nr kontaktowy | Opis | Sygnał wejściowy / sygnał wyjściowy |
| 1 | "Waga" | Sygnał wejściowy |
| 2 i 3 | Nieużywany | - |
| 4 | Linia CAN wysokiego poziomu | Sygnał wejściowy / sygnał wyjściowy |
| 5 | Niski poziom linii CAN | Sygnał wejściowy / sygnał wyjściowy |
| 6 | Sygnał motoreduktora kursu jazdy prawego reflektora | Sygnał wyjściowy |
| 7 | Sygnał motoreduktora kursu jazdy prawego reflektora | Sygnał wyjściowy |
| 8 | Nieużywany | - |
| 9 | Motoreduktor korekcji pochylenia prawego reflektora 1 - "pozytywny" (+) | Sygnał wyjściowy |
| 10 | Motoreduktor korekcji pochylenia prawego reflektora 1 - "negatywny" (-) | Sygnał wejściowy |
| 11 | Silnik elektryczny motoreduktora do korekcji pochylenia prawego reflektora 2 - "pozytywny" (+) | Sygnał wyjściowy |
| 12 | Silnik elektryczny motoreduktora do korekcji pochylenia prawego reflektora 2 - "negatywny" (-) | Sygnał wejściowy |
| 13 | Zasilany zapłonem 12V | Sygnał wejściowy |
| 14 do 17 | Nieużywany | - |
| 18 | Sygnał motoreduktora jazdy kursu lewego reflektora | Sygnał wyjściowy |
| 19 | Sygnał motoreduktora jazdy kursu lewego reflektora | Sygnał wyjściowy |
| 20 | Nieużywany | - |
| 21 | Silnik elektryczny motoreduktora do korekty pochylenia lewego reflektora 1 - "pozytywny" (+) | Sygnał wyjściowy |
| 22 | Silnik elektryczny motoreduktora do korekty pochylenia lewego reflektora 1 - "negatywny" (-) | Sygnał wejściowy |
| 23 | Silnik elektryczny motoreduktora do korekty pochylenia lewego reflektora 2 - "pozytywny" (+) | Sygnał wyjściowy |
| 24 | Silnik elektryczny motoreduktora do korekty pochylenia lewego reflektora 2 - "negatywny" (-) | Sygnał wejściowy |
Tryby pracy
System AFS może pracować w czterech trybach:
- Tryb manewrowania
- Normalny tryb jazdy
- Tryb jazdy z dużą prędkością
- Tryb jazdy do tyłu
Normalny tryb jazdy jest używany podczas jazdy z prędkością 30-70 km/h. W normalnym trybie jazdy oba reflektory ksenonowe poruszają się w stosunku 3:1, np. podczas skrętu w lewo lewy reflektor obraca się o 3 stopnie, a prawy o 1 stopień. W tym trybie maksymalny kąt obrotu napędu naświetlacza w kierunku obrotu wynosi 12 stopni.
Tryb jazdy z dużą prędkością jest używany podczas jazdy z prędkością powyżej 70 km/h. W trybie jazdy z dużą prędkością oba reflektory ksenonowe poruszają się w stosunku 3:1, na przykład podczas skrętu w lewo lewy reflektor obraca się o 3 stopnie, a prawy o 1 stopień. W tym trybie maksymalny kąt obrotu naświetlacza w kierunku obrotu wynosi 10 stopni.
W trybie cofania reflektory są wyłączane po włączeniu biegu wstecznego. Reflektory systemu AFS ustawiają się w położeniu środkowym, a boczne światła odchylania, jeśli są włączone, wyłączają się. Jeśli spełnione są niezbędne warunki (te. prędkość pojazdu przekracza 3 km/h), po wyłączeniu biegu wstecznego światła AFS ustawiają się w położeniu odpowiadającym kątowi skrętu kierownicy i zapalają się boczne światła pochylenia.
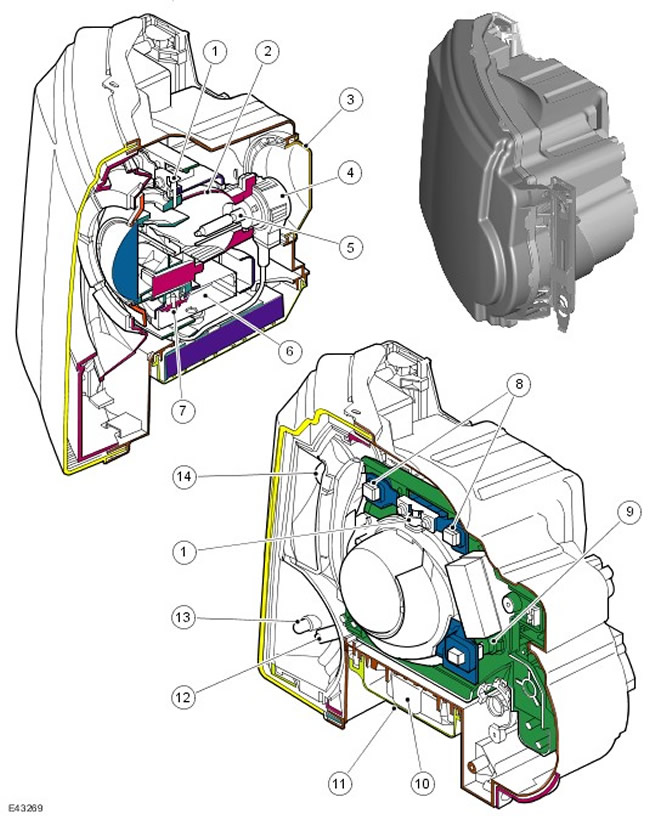
Adaptacyjne reflektory ksenonowe
| Nazwa przedmiotu | Numer części zamiennej | Opis |
| 1 | - | Oś pozioma reflektora |
| 2 | - | Reflektor |
| 3 | - | Pokrywa luku serwisowego |
| 4 | - | Gniazdo lampy ksenonowej DS2 |
| 5 | - | Lampa ksenonowa DS2 |
| 6 | - | Motoreduktor napędu kursu do poziomej regulacji reflektora adaptacyjnego |
| 7 | - | Napęd motoreduktorem poziomym |
| 8 | - | Pionowe osie reflektora |
| 9 | - | Motoreduktor napędu kursu do pionowej regulacji reflektora adaptacyjnego |
| 10 | - | sterownik reflektorów ksenonowych |
| 11 | - | Pokrywa kontrolera |
| 12 | - | Lampa boczna odchylana (z wyłączeniem pojazdów przeznaczonych na rynek amerykański) |
| 13 | - | lampa obrysowa |
| 14 | - | Lampka kierunkowskazu |
Konstrukcja adaptacyjnego reflektora ksenonowego jest podobna do konstrukcji nieadaptacyjnego reflektora ksenonowego. Aby wykonać funkcję AFS, do bloku reflektorów dodano platformę, na której znajdują się węzły AFS. Pozostałe światła wchodzące w skład reflektorów ksenonowych nie różnią się od opisanych wcześniej. Działanie obrotowych świateł pozycyjnych reflektora adaptacyjnego różni się od działania świateł zakrętowych podczas włączania konwencjonalnego reflektora ksenonowego.
Konstrukcja platformy ma łożysko promieniowe u góry i podkładkę oporową u dołu, które zapewniają punkty podparcia poziomej osi reflektora ksenonowego. Zakończenie dolnej osi reflektora posiada wypusty, które wkłada się w wielowypustowy otwór silnika elektrycznego motoreduktora AFS w celu regulacji pionowej. Platforma jest zawieszona na dwóch elastycznych wspornikach u góry, które zapewniają punkty mocowania pionowej osi reflektora ksenonowego, co umożliwia regulację reflektora w pionie. Dolna część platformy mocowana jest do silnika elektrycznego motoreduktora regulacji pionowej AFS.
Motoreduktory AFS to silniki prądu stałego sterowane przez sterownik AFS. Sterownik AFS zapewnia również obwód uziemienia silnika.
W motoreduktorach znajduje się potencjometr, który połączony jest przewodami ze złoconymi stykami złącza podłączonego do sterownika AFS. Dwa przewody podłączone do każdego motoreduktora dostarczają do sterownika AFS sygnały zwrotne, co pozwala na regulację położenia reflektora ksenonowego z dużą dokładnością.
Do dynamicznej regulacji zasięgu reflektorów sterownik AFS wykorzystuje sygnały z przedniego i tylnego zawieszenia oraz steruje silnikiem elektrycznym motoreduktora w płaszczyźnie pionowej. Dodatkowo sterownik AFS reguluje zasięg światła poprzez zmianę zasięgu reflektorów, do czego wykorzystywany jest sygnał prędkości odbierany ze sterownika ABS.
Procedura inicjacji
Procedura inicjacji systemu polega na ustawieniu osi reflektorów we właściwym położeniu w płaszczyźnie pionowej i poziomej i jest wykonywana po otrzymaniu przez sterownik AFS sygnału do włączenia zapłonu.
Rozpoczęcie regulacji zasięgu reflektorów zajmuje mniej niż 3 sekundy. Silniki elektryczne do regulacji zasięgu reflektorów z ich pierwotnego położenia (ekstremalna góra, ekstremalne dno lub dowolne pośrednie) są ustawiane w najniższej pozycji, a następnie w pozycji poziomej (pochylenie osi wynosi 0 stopni).
Inicjacja jazdy po kursie AFS rozpoczyna się mniej niż 1 sekundę po uruchomieniu silnika regulacji ustawienia reflektorów, dzięki czemu oś pionowa reflektorów znajduje się pod kątem 0 stopni lub mniej, aby uniknąć oślepiania pojazdów nadjeżdżających z przeciwka. Rozpoczęcie biegu reflektorów trwa mniej niż 2,5 sekundy. Silniki elektryczne silników oczywiście prawego i lewego reflektora najpierw całkowicie obracają reflektory z pozycji 0°do wewnątrz, następnie obracają je całkowicie na zewnątrz, a następnie ponownie ustawiają je w pozycji 0°.
Tryb awaryjny
W przypadku błędu w działaniu systemu AFS, na tablicy wskaźników zapala się wizualna lampka ostrzegawcza, ostrzegająca kierowcę o usterce. Sygnalizator włącza się na pozycji II kluczyka w stacyjce i nie przestaje świecić do czasu usunięcia usterki. Lampka ostrzegawcza AFS zapala się również w przypadku uszkodzenia czujnika położenia wału kierownicy lub braku sygnału prędkości pojazdu.
Aktywacja lampki ostrzegawczej AFS nie musi być związana z nieprawidłowym działaniem tego systemu. Uszkodzony może być inny układ, od którego zależy działanie systemu AFS.
Kontroler AFS przeprowadza diagnostykę przy każdym żądaniu aktywacji systemu. W przypadku wykrycia błędu kontroler AFS zawiesza działanie systemu.
Jeśli system AFS ulegnie awarii, gdy reflektor ksenonowy nie jest skierowany na wprost, sterownik AFS spróbuje wyzerować reflektor ksenonowy (prosto). Jeśli ta regulacja nie jest możliwa, kontroler AFS obniży reflektor za pomocą silników korekcji nachylenia, aby uniknąć oślepiania nadjeżdżających pojazdów.
Oprogramowanie kontrolera AFS umożliwia znalezienie własnych usterek wewnętrznych. Jeśli wykryje własną usterkę, sterownik ustawi reflektory na zero i zatrzyma dalsze sterowanie.
Kody usterek można zeskanować za pomocą skanera T4.
Światła boczne odchylane
UWAGA: * Pojazdy amerykańskie nie są wyposażone w odchylane światła boczne
Obrotowe światła boczne mają na celu oświetlanie kierunku jazdy podczas skręcania przy niskiej prędkości. Światła te są standardem w pojazdach z adaptacyjnymi reflektorami. Konstrukcja dyfuzorów pozwala na odchylenie wiązki światła o około 45 stopni od osi pojazdu. Światła boczne osi wychylnej są sterowane przez jednostkę CJB.
Odchylane światło boczne jest wbudowane w zewnętrzną część reflektora i znajduje się w tej samej obudowie co odbłyśnik i boczne światło obrysowe.
W odchylanym świetle bocznym zastosowano żarówkę halogenową H8 o mocy 35 W umieszczoną w gnieździe podłączonym przewodem do złącza na obudowie reflektora. Naboje są wkładane do otworu w obudowie reflektora i obracane, aż się zablokują. Dostęp do lampy można uzyskać przez zdejmowaną osłonę z tyłu obudowy reflektora.
Sterowanie reflektorami AFS
Sterowanie światłami bocznymi obrotowymi odbywa się na podstawie sygnału czujnika położenia kierownicy odbieranego przez sterownik AFS i CJB. Kontroler AFS wysyła żądanie włączenia bocznego światła obrotowego do CJB, który włącza żarówkę.
Podczas jazdy z prędkością powyżej 48 km/h boczne światło pochylenia włącza się w kierunku skrętu pojazdu, gdy kąt skrętu kierownicy osiągnie 70 stopni. Jeśli skręt pojazdu zmniejszy się, boczne światło pochylenia gaśnie, gdy kąt skrętu kierownicy osiągnie 50 stopni.
Podczas jazdy z prędkością poniżej 48 km/h boczne światło pochylenia włącza się w kierunku skrętu pojazdu, gdy kąt skrętu kierownicy osiągnie 245 stopni. Jeśli skręt pojazdu zmniejszy się, boczne światło pochylenia gaśnie, gdy kąt skrętu kierownicy osiągnie 225 stopni.
Światła boczne osi wychylnej są sterowane przez jednostkę CJB. Po przejściu lampy w tryb pracy, jednostka CJB zmniejsza jasność poprzez podanie sygnałów o modulowanej szerokości impulsu (PWM) przez około dwie sekundy. Kiedy lampa się wyłącza, CJB przyciemnia lampę poprzez zmniejszenie napięcia sygnałów PWM.
Komentarze do tego artykułu