Gdy system wspomagania parkowania tyłem jest włączony, moduł sterujący systemu zapala diodę LED w przycisku przełącznika, aktywuje czujniki i wydaje systemowi polecenie wyemitowania pojedynczego sygnału dźwiękowego w celu potwierdzenia aktywacji systemu. Jeśli obiekt znajdzie się w zasięgu czujnika, po włączeniu systemu natychmiast rozlegnie się sekwencja dźwiękowych sygnałów ostrzegawczych.
Jeśli działanie systemu wspomagania parkowania nie jest wymagane, można go tymczasowo wyłączyć, naciskając przycisk przełącznika. W pojazdach wyposażonych tylko w tylne czujniki system można ponownie włączyć, ponownie naciskając przełącznik lub wyłączając i włączając zapłon. System włączy się wtedy automatycznie po wybraniu biegu wstecznego. Układ pozostaje aktywny podczas przełączania z biegu wstecznego na neutralny. Uwzględnia to prawdopodobieństwo, że kierowca będzie kontynuował jazdę (w jakikolwiek sposób) przesunąć pojazd do tyłu ze skrzynią biegów w położeniu neutralnym.
Gdy przyczepa jest podłączona, moduł pomocy przy parkowaniu otrzymuje sygnał przez magistralę CAN z centralnej skrzynki elektrycznej. Po otrzymaniu takiego sygnału moduł sterujący systemu wspomagania parkowania zawiesza działanie systemu.
W pojazdach wyposażonych w przednie i tylne czujniki system wspomagania parkowania włącza się automatycznie po włączeniu zapłonu (pozycja II), wybierak nie znajduje się w położeniu parkowania, a elektroniczny hamulec postojowy jest wyłączony. Przy prędkości powyżej 10 km/h przednie wspomaganie parkowania zostaje wyłączone. Gdy prędkość pojazdu spadnie poniżej 6 km/h, przedni system wspomagania parkowania wznowi działanie. Jeśli włączony jest elektroniczny hamulec postojowy (EPB) lub wybierak znajduje się w położeniu parkowania, system wspomagania parkowania jest wyłączony.
Działanie czujnika
Moduł systemu wspomagania parkowania analizuje dane otrzymane z czujników w celu wykrycia przeszkód znajdujących się w polu działania czujników. Jeśli nie zostaną wykryte żadne przeszkody, system wspomagania parkowania nie emituje żadnych sygnałów dźwiękowych. W przypadku wykrycia przeszkody głośnik układu wspomagania parkowania wyemituje serię sygnałów dźwiękowych.
Maksymalna odległość wykrywania przeszkód wynosi 1800 mm. Po wykryciu przeszkody, w miarę zbliżania się do niej, odstęp między sygnałami dźwiękowymi zmniejsza się, aw odległości około 350 mm od przeszkody sygnał dźwiękowy staje się ciągły.
Jeżeli od momentu wykrycia przeszkody nie nastąpi dalsze zmniejszenie odległości między przeszkodą a centralnymi czujnikami, to odstęp między sygnałami dźwiękowymi nie ulega zmianie. Jeśli obiekt zostanie wykryty tylko przez jeden czujnik krawędziowy, alarm wyłączy się po 5 sekundach, jeśli odległość od obiektu do czujnika krawędziowego nie ulegnie zmianie.
Strefa wykrywania
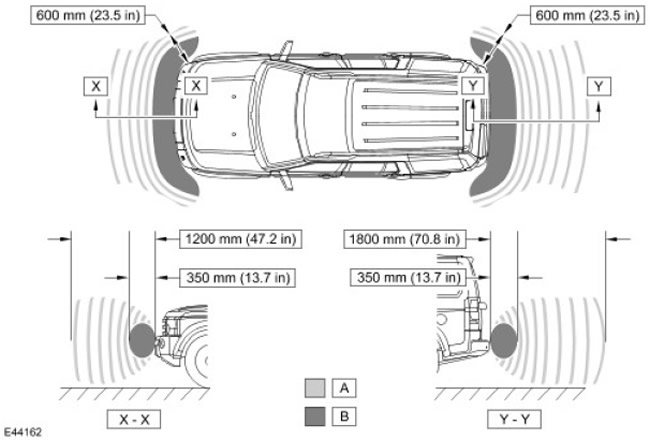
| Nazwa przedmiotu | Numer części zamiennej | Opis |
| A | - | Przerywany dźwięk ostrzegawczy |
| B | - | Ciągły dźwięk ostrzegawczy |
Wykrywanie przeszkód i obliczanie odległości
Pracując w połączonym trybie odbioru/nadawania, czujnik emituje impulsy ultradźwiękowe i odbiera sygnały odbite od przeszkody. Moduł sterujący wspomagania parkowania wzmacnia odbite sygnały i porównuje je z zaprogramowanymi progami w celu obliczenia odległości. Osiąga się to poprzez określenie czasu, jaki upłynął między wysłaniem a odbiorem sygnału ultradźwiękowego.
Gdy czujnik jest w trybie odbioru, odbiera sygnały promieniowania z sąsiedniego czujnika. Ten tryb służy do poprawy dokładności systemu.
Cykl wykrywania przeszkody polega na nadaniu i odbiorze serii impulsów przez jeden czujnik działający w trybie mieszanym na polecenia modułu sterującego systemu wspomagania parkowania.. Następnie komputer przełącza ten i sąsiednie czujniki, aby odbierać tylko odbity sygnał. Po krótkiej przerwie operacja jest powtarzana, ale teraz kolejny czujnik pracuje w trybie mieszanym. Cykl trwa do momentu, aż wszystkie 4 przetworniki wyemitują sygnały ultradźwiękowe. Zajmuje to około 100 milisekund. Moduł sterujący wykonuje kilka pomiarów sygnałów tego samego czujnika w celu wyeliminowania przypadkowych błędów w obliczeniach.
Jeśli obiekt znajduje się dokładnie naprzeciwko czujnika, odległość jest obliczana na podstawie czasu między wysłaniem sygnału a jego odbiorem. Jeśli przeszkoda znajduje się między dwoma czujnikami, moduł sterujący oblicza odległość na podstawie sygnałów z dwóch czujników, rozwiązując problem triangulacji.
Aby rozwiązać problem triangulacji, moduł sterujący musi znać odległość między poszczególnymi czujnikami w zderzaku. Informacje te są przechowywane w pamięci modułu sterującego. Znając odległość każdego czujnika od przeszkody oraz odległość między sąsiednimi czujnikami, moduł sterujący może obliczyć minimalną odległość zderzaka pojazdu od przeszkody.
Gdy samochód zbliża się do kilku przeszkód jednocześnie, moduł sterujący określa odległość do najbliższej.
Komentarze do tego artykułu