Kada se aktivira sustav pomoći pri parkiranju unatrag, upravljački modul sustava osvjetljava LED u gumbu prekidača, aktivira senzore i naređuje sustavu da emitira jedan zvučni signal za potvrdu aktivacije sustava. Ako objekt uđe u domet senzora, odmah će se oglasiti niz zvučnih signala upozorenja kada se sustav uključi.
Ako rad sustava pomoći pri parkiranju nije potreban, tada se može privremeno onemogućiti pritiskom na prekidač. Za vozila opremljena samo stražnjim senzorima, sustav se može ponovno aktivirati ponovnim pritiskom na prekidač ili isključivanjem i ponovnim uključivanjem kontakta. Sustav će se zatim automatski uključiti kada se odabere stupanj prijenosa za vožnju unatrag. Sustav ostaje aktivan kada se mijenja iz položaja za vožnju unatrag u neutralni položaj. Ovo uzima u obzir vjerojatnost da će vozač nastaviti (u svakom slucaju) pomaknite vozilo unatrag s mjenjačem u neutralnom položaju.
Kada je priključena prikolica, modul pomoći pri parkiranju prima signal putem CAN sabirnice iz središnje električne kutije. Po primitku takvog signala, upravljački modul sustava pomoći pri parkiranju obustavlja sustav.
Na vozilima opremljenim prednjim i stražnjim senzorima, sustav pomoći pri parkiranju automatski se aktivira kada je kontakt uključen (položaj II), birač nije u položaju za parkiranje i elektronička parkirna kočnica je isključena. Pri brzinama iznad 10 km/h, prednja pomoć pri parkiranju je deaktivirana. Kada brzina vozila padne ispod 6 km/h, prednji sustav pomoći pri parkiranju će nastaviti s radom. Ako je aktivirana elektronička parkirna kočnica (EPB) ili je birač postavljen u položaj za parkiranje, sustav pomoći pri parkiranju je isključen.
Rad senzora
Modul sustava pomoći pri parkiranju analizira podatke primljene od senzora kako bi otkrio prepreke u području djelovanja senzora. Ako se ne otkriju prepreke, sustav pomoći pri parkiranju ne emitira zvučne signale. Ako se otkrije prepreka, zvučnik za pomoć pri parkiranju će emitirati niz zvučnih signala.
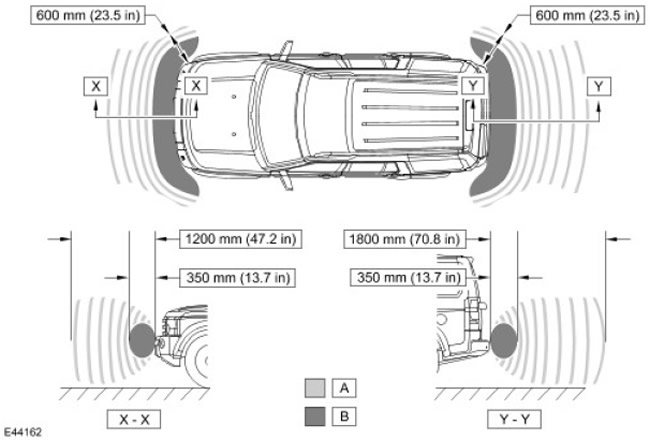
Maksimalna udaljenost otkrivanja prepreka je 1800 mm. Kada se otkrije prepreka, kako joj se približavate, razmak između zvučnih signala se smanjuje, a na udaljenosti od približno 350 mm od prepreke, zvučni signal postaje kontinuiran.
Ako nema daljeg smanjivanja udaljenosti između prepreke i središnjih senzora od trenutka otkrivanja prepreke, tada se interval između zvučnih signala ne mijenja. Ako objekt detektira samo jedan rubni senzor, alarm će prestati nakon 5 sekundi ako se ne promijeni udaljenost od objekta do rubnog senzora.
Zona detekcije
| Ime proizvoda | Broj rezervnog dijela | Opis |
| A | - | Isprekidani ton upozorenja |
| B | - | Kontinuirani zvuk upozorenja |
Detekcija prepreka i izračun udaljenosti
Radeći u kombiniranom načinu primanja/odašiljanja, senzor emitira ultrazvučne impulse i prima signale reflektirane od prepreke. Upravljački modul pomoći pri parkiranju pojačava reflektirane signale i uspoređuje ih s programiranim pragovima za izračunavanje udaljenosti. To se postiže određivanjem vremena koje je proteklo između prijenosa i prijema ultrazvučnog signala.
Kada je senzor u načinu prijema, prima signale zračenja od susjednog senzora. Ovaj način se koristi za poboljšanje točnosti sustava.
Ciklus otkrivanja prepreka sastoji se od prijenosa i primanja niza impulsa od strane jednog senzora koji radi u kombiniranom načinu rada prema naredbama upravljačkog modula sustava pomoći pri parkiranju.. Zatim računalo prebacuje ovaj, kao i susjedne senzore, da prima samo reflektirani signal. Nakon kratke pauze, operacija se ponavlja, ali sada sljedeći senzor radi u kombiniranom načinu rada. Ciklus se nastavlja sve dok sve 4 sonde ne emitiraju ultrazvučne signale. Ovo traje oko 100 milisekundi. Upravljački modul provodi nekoliko mjerenja signala istog senzora kako bi se eliminirale slučajne pogreške u izračunima.
Ako je objekt točno nasuprot senzoru, udaljenost se izračunava iz vremena između prijenosa i prijema signala. Ako se prepreka nalazi između dva senzora, upravljački modul izračunava udaljenost iz signala dvaju senzora, rješavajući problem triangulacije.
Kako bi se riješio problem triangulacije, upravljački modul mora znati udaljenost između pojedinačnih senzora u braniku. Ove informacije su pohranjene u memoriji upravljačkog modula. Poznavajući udaljenosti od svakog senzora do prepreke i udaljenost između susjednih senzora, upravljački modul može izračunati minimalnu udaljenost od branika vozila do prepreke.
Kada se automobil približi nekoliko prepreka u isto vrijeme, upravljački modul određuje udaljenost do najbliže.
Komentari na ovaj članak